Consider a single message sent between two processes, P1 and
P2. Figure 1 shows the two possible cases,
distinguishing which process has accumulated more overhead up until
the time of the message communication. Execution time advances from
left to right and shown on the timelines are send events (![]() ) and
receive events (
) and
receive events (![]() , receive begin;
, receive begin; ![]() , receive end). The
overhead on P1 is
, receive end). The
overhead on P1 is ![]() and the overhead on P2 is
and the overhead on P2 is ![]() . The overhead
is shown as a blocked region immediately before the
. The overhead
is shown as a blocked region immediately before the ![]() or
or ![]() events
to easily see its size in the figure, but it is actually spread out
across the preceding timeline where profiled events occur. Also
designated is the waiting time (
events
to easily see its size in the figure, but it is actually spread out
across the preceding timeline where profiled events occur. Also
designated is the waiting time (![]() ) between
) between ![]() and
and ![]() ,
assuming waiting time can be measured by the profiling system.
,
assuming waiting time can be measured by the profiling system.
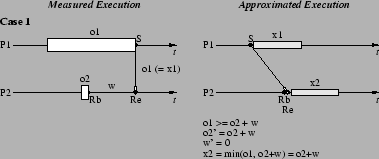
Case 1 occurs when P1's overhead is greater than or equal to
P2's overhead plus the waiting time (
![]() ).
A rational reconstruction of the approximated execution
determines that P2 would not have waited for the message
(i.e.,
).
A rational reconstruction of the approximated execution
determines that P2 would not have waited for the message
(i.e., ![]() would occur earlier than
would occur earlier than ![]() ).
Hence, the approximated waiting time (designated as
).
Hence, the approximated waiting time (designated as ![]() ) should be
zero, as seen in the approximated execution timeline.
Of course, the problem is that P2 has already waited in the measured
execution for the message to be received. In order for P2 to know
P1's message would have arrived earlier, P1 must communicate this
information. Clearly, the information is exactly the value
) should be
zero, as seen in the approximated execution timeline.
Of course, the problem is that P2 has already waited in the measured
execution for the message to be received. In order for P2 to know
P1's message would have arrived earlier, P1 must communicate this
information. Clearly, the information is exactly the value ![]() , P1's
overhead. This is indicated in the figure by tagging the message
communication arrow with this value.
, P1's
overhead. This is indicated in the figure by tagging the message
communication arrow with this value.
With P1's overhead information, P2 can determine what to do about the
waiting time. The waiting time has already been measured and must be
correctly accounted. If the approximated waiting is adjusted to zero,
where should the elapsed time represented by ![]() go? If the profiling
overhead is to be correctly compensated, the measured waiting time
must be attributed to P2's approximated overhead (
go? If the profiling
overhead is to be correctly compensated, the measured waiting time
must be attributed to P2's approximated overhead (![]() )!
This is interesting because it shows how
the naive overhead compensation can lead to errors without conveyance
of delay information between sender and receiver. It is also
important to note that
)!
This is interesting because it shows how
the naive overhead compensation can lead to errors without conveyance
of delay information between sender and receiver. It is also
important to note that ![]() cannot be moved back any further in the
approximated execution. This suggests that the only correction we can
ever make in the receiver is in the waiting time.
cannot be moved back any further in the
approximated execution. This suggests that the only correction we can
ever make in the receiver is in the waiting time.
The overhead value sent by P1 with the message conveys to P2 the
information ``this message was delayed being sent by ![]() amount of
time'' or ``this message would have been sent
amount of
time'' or ``this message would have been sent ![]() time units
earlier.'' We contend that this is exactly the information needed by
P2 to correctly adjust its profiling metrics (i.e., compensate for
overhead in parallel execution). We refer to the value sent by P1 as
delay and will assign the designator
time units
earlier.'' We contend that this is exactly the information needed by
P2 to correctly adjust its profiling metrics (i.e., compensate for
overhead in parallel execution). We refer to the value sent by P1 as
delay and will assign the designator ![]() to represent its
modeling and analysis that follows. For instance, P1's delay is given
by
to represent its
modeling and analysis that follows. For instance, P1's delay is given
by ![]() . In both cases,
. In both cases, ![]() , but it is not always true that delay
will be equal to accumulated overhead, as we will see. Now an
interesting question arises. How much earlier would future events on
process 2 occur in the approximated execution after the message from
P1 has been received? In general, each process will maintain a delay
value (
, but it is not always true that delay
will be equal to accumulated overhead, as we will see. Now an
interesting question arises. How much earlier would future events on
process 2 occur in the approximated execution after the message from
P1 has been received? In general, each process will maintain a delay
value (![]() for process Pi) for it to include in its next send message
to tell the receiving process how much earlier the message would have
been sent. In the approximated execution, for denotational purposes,
we show the
for process Pi) for it to include in its next send message
to tell the receiving process how much earlier the message would have
been sent. In the approximated execution, for denotational purposes,
we show the ![]() and
and ![]() values for P1 and P2 as shaded regions after
the last events,
values for P1 and P2 as shaded regions after
the last events, ![]() and
and ![]() , respectively. We also show an
expression for the calculation of
, respectively. We also show an
expression for the calculation of ![]() for this case.
for this case.
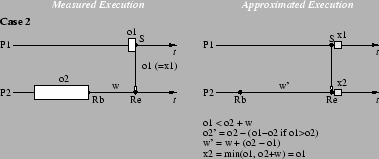
Moving on to the second case, the overhead and waiting time in P2 is
greater than what P1 reports (i.e., ![]() ). Rationally, this
means that
). Rationally, this
means that ![]() happens after
happens after ![]() in the approximated execution. What
is the effect on
in the approximated execution. What
is the effect on ![]() , the approximated waiting time? It is
interesting to see that
, the approximated waiting time? It is
interesting to see that ![]() can increase or decrease, depending on
the relation of
can increase or decrease, depending on
the relation of ![]() to
to ![]() . (Remember,
. (Remember, ![]() is the same as
is the same as ![]() in
these cases.) However, the occurrence of
in
these cases.) However, the occurrence of ![]() is certainly dependent
on
is certainly dependent
on ![]() and, thus,
and, thus, ![]() will be entirely determined by (and, in fact,
equal to)
will be entirely determined by (and, in fact,
equal to) ![]() .
.