|
||||||||||||||||
|
iSIMAn important part of the ROPE project is to hypothesize about the operational envelopes of MDS Rovers, and to then test the MDS Rovers in various simulated environments in order to validate the operational envelopes. This short movie is an example of the motivation for using a simulator: Star Trek: The Next Generation Episode: "Booby Trap" Originally built as an iPAQ SIMulator, iSIM's sole purpose was to simulate wireless enabled, wearable computers moving around and interacting in the real world. With the ability to support autonomous agents, however, iSIM quickly became an all purpose interactive simulator. Agents in iSIM have the ability to move in their environment, grab objects, carry objects, communicate with other agents, and sense the environment. iSIM supports sensing of location, position, obstacles, range finding, temperature, sound, and vision. iSIM can also be easily extended to include additional sensors. For more information about iSIM, please go to the iSIM website. Below are some various screenshots of iSIM in action.
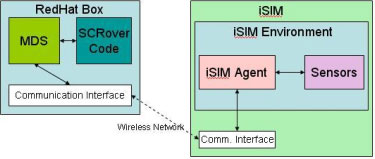
iSIM is also able to support autonomous agents that move and communicate with other agents on their own behalf. In addition, external programs can be used to control an agent and retrieve the agent's sensor data. The latter is how we were able to use MDS with iSIM. Agents, in general, have the ability to move in the environment, and can also sense the environment as described earlier. We have added a special iSIM agent that contains a command server, which listens for commands to move or requests for sensor data. Using the communication interface, depicted in Figure 5 MDS is able to send all of its commands and requests to iSIM. The command server connects to our MDS server via a wireless network connection. The server interprets commands from MDS and executes the appropriate action, or returns the appropriate sensor data.
Our MDS server is a Toshiba P25-S607 laptop running RedHat Linux. Our initial experiments have used hardware adapters and goal files designed by USC. We have adapted iSIM's sensor data to work with their SCRover code. You can see iSIM executing their wall following task in the video below.
If you have any questions about iSIM, or are interested in using the iSIM, contact one of the researchers. |
|||||||||||||||