|
|||||||
|
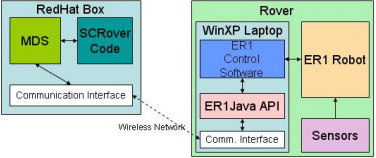
ROPER the ER1ROPER (Reasoning about OPerational Envelopes for a Rover) is our robotic test bed for investigating the operational envelopes of MDS. The robot is an ER1 made by Evolution Robotics. The ER1 is equipped with 3 IR sensors, a camera, a microphone, and two wheel motors. The motors are controlled by a control box, which is hooked up to a laptop running Evolution's Robot Control Center on Windows XP. We designed a Java API for the ER1 to allow other applications to monitor sensor readings and control movement. This API was used by a socket server which connects to our MDS server via a wireless network connection. The socket server interprets commands from MDS and executes the appropriate action, or returns the appropriate sensor data. Our MDS server is a Toshiba P25-S607 laptop running RedHat Linux. Our initial experiments have used hardware adapters and goal files designed by USC. We have adapted the ER1's sensor data to work with their SCRover code. You can see Roper executing their wall following task in the videos below.
If you have any questions about ROPER, or are interested in using the Java API, contact one of the researchers. We will be replacing our ER1 and its control software with Evolution
Robotics' ERSP
Scorpion and the ERSP 3.0 Robot Control Software. The
Scorpion has quite a bit more functionality. Namely more numerous IR
sensors, a moveable camera, and an impact sensor. The ESRP control
software will allow more acurate control of the drive motors, specifically
allowing independent speed control for driving in an arc.
|
||||||